
MARS | Technology
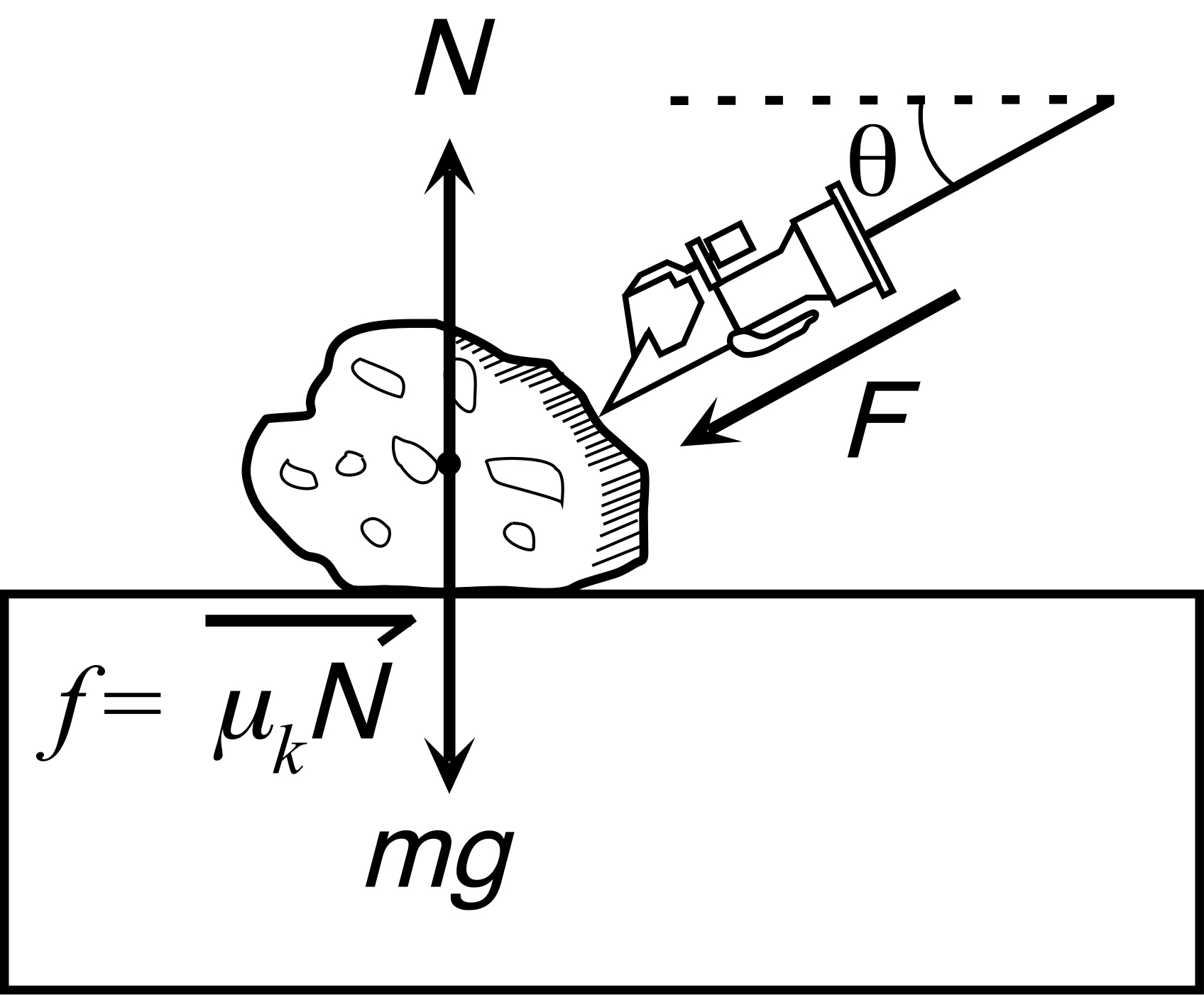
Block diagram of lander sampling arm in contact with a rock.
Full Resolution Version: 264 KB
Order high-quality reprints
Full Resolution Version: 264 KB
Order high-quality reprints
Extracting scientific results from robotic arm support operations: A technique for estimating the density and composition of rocks on Mars
1Bradley J. Thomson, 2Peter H. Schultz and 1Nathan T. Bridges
1Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA 91109 USA
2Department of Geosciences, Brown University, Providence, RI 02912 USA
Mars 4, 27-32, 2008 | doi:10.1555/mars.2008.0003
Received March 31, 2008 | Accepted June 5, 2008 | Published July 3, 2008
This contribution presents the unique technique of using rock pushing activities to estimate the densities of rocks remotely.
PDF 2.0 MB | ZIP 1.9 MB | TAR.GZ 1.9 MB | Supporting Files